发布时间:2025/5/30 9:44:39 发布者: 阅读次数:4492
MTHelper 使用手册
MTHelper 是厂商提供的全功能测试软件,可以用来测试产品的全部功能,提供了基本的操作方式,可以满足一般的使用要求。如果您有特殊的控制要求,请选择使用其它的配套软件或者二次开发包自行开发。
MTHelper 可以运行在 Windows 2000、Windows XP、Windows Vista、Windows 7、 Windows 8 等Windows 系统上。
需要运行软件的电脑上有串口(RS232)或者 USB 口或者网口,根据配套的板卡的通信接口来确定。对于需要用串口而没有串口的机器,可以选择使用 USB 转 RS232 串口线进行转接使用。
软件启动界面如上图所示
版本号表示当前运行的 MTHelper 的版本号。请向厂商索取最新的版本软件。
确认通过串口线或者 USB 线连接好设备后,即可以进行连接操作。
1.1 连接设备

连接设备的界面如上所示
当您连接的设备是串口通信方式时,请选择,并选择串口,在串口通信方式下,可以选择电脑上的所有串口设备,请保证选择的是您连接的串口设备。
当您连接的设备是USB 口时,请选择这个选项。
当您连接的设备是网络接口时,请选择这个选项。请输入正确的设备 IP 地址和端口。
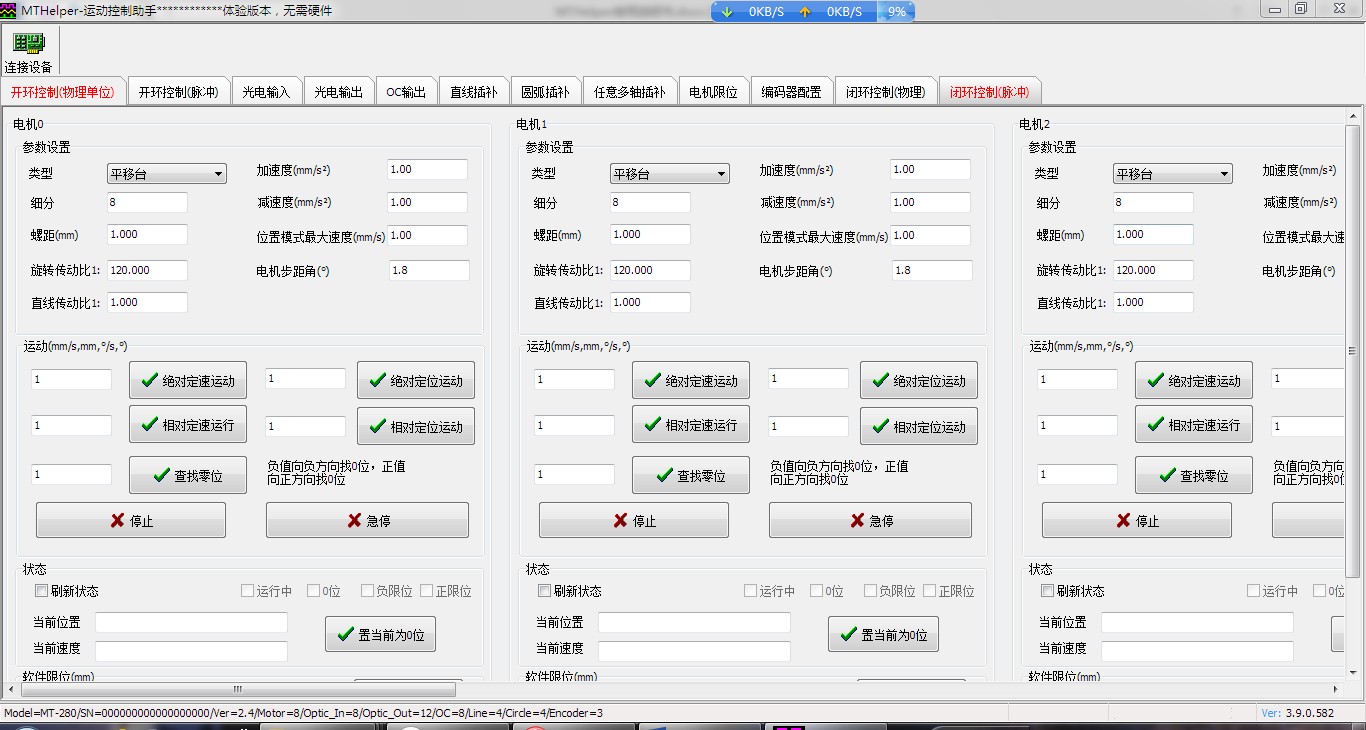
成功连接设备以后,在状态栏会显示设备相关的信息,保护设备的型号() Model,序列号(SN),功能类型和数量

根据设备具有的不同功能,会出现不同的选项卡,通过切换选项卡,可以控制不同的功能。当前的选项卡文字显示为红色。不具有相关功能的硬件,不出现对应的选项卡。
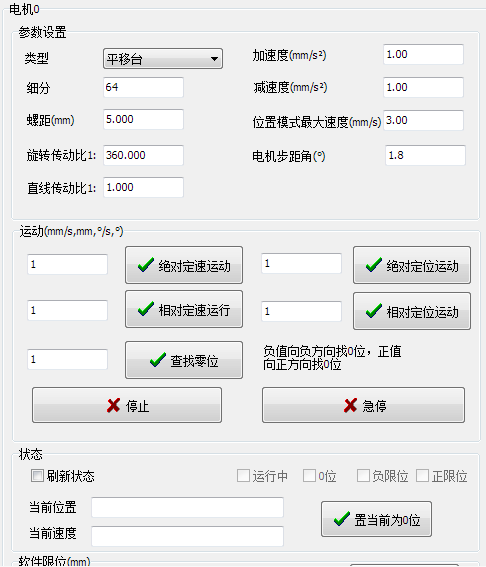
电机控制的界面如上图所示。
电机轴编号从 0 开始,对应第一轴。
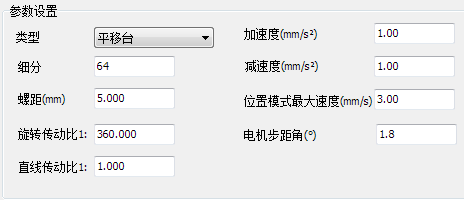
请根据控制的对象选择对应的机械类型。平移型对应的控制单位为 mm
旋转型对应的控制单位°
平移型对应螺距参数,即电机旋转一周对应的移动量
旋转型对应传动比参数,即电机旋转多少周对应目标旋转一周。
运动参数包括加速度、减速度和位置模式时的最大速度。一般的运动过程都保护加速阶段、匀速阶段和减速阶段。
加速度为从低速到高速的增加幅度,减速度为从高速到低速的减少幅度。请根据目标的惯量特性选择合适的加速度、减速度,可以从小往大开始调整。过小的加减速会造成提速、减速太慢;过大的加速度会造成振动、失步、振荡等。
位置模式的最大速度是指位置模式下匀速运动的速度,在位置模式下有效。
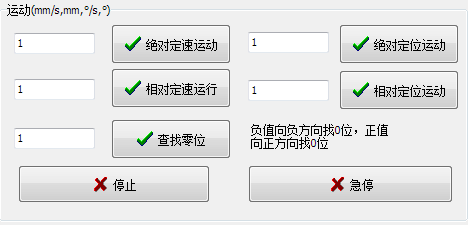
工作模式包括速度模式、位置模式和零位模式。
速度模式是指本轴电机以固定的速度持续动作,在运动中可以实时进行速度调整。速度调整采用设置的加速度和减速度。本模式适合需要以指定速度运动的情况下。
位置模式指本轴电机按指定的加速度、减速度和最大速度进行一段距离或者一定角度的运动,在运动过程中可以实时调整新的目的位置。本模式适合需要运行指定长度的或者指定角度需要定位的的情况下。
零位模式是指本轴电机按指定的速度进行零位查找,本速度可正可负。速度为负时,向负向查找零位,直至碰到零位开关或者负限位开关。 速度为正时,向正向查找零位,直至碰到零位开关或者正限位开关。
速度模式的控制包括相对方式控制和绝对方式控制。
相对方式是指相对当前的实时速度进行调整,调整的程度可以是负数也可以是正数,当前的实时速度是指指令到达控制器时的速度。本方式适合在需要精确调整转速而又不知道具体需要的转速的情况下,可以连续微调。
绝对方式是指控制本轴电机按指定的速度进行运动,指定的速度可以是负数也可以是正数,由当前的速度减速或者减速到指定的绝对速度。
位置模式的控制包括相对方式控制和绝对方式控制。
相对方式是指相对当前的实时位置进行调整,调整的程度可以是负数也可以是正数,当前的实时位置是指指令到达控制器时的位置。本方式适合在需要精确调整位置而又不知道具体位置的情况下,可以连续微调。
绝对方式是指控制本轴电机本轴电机到指定的位置,指定的位置可以是负数也可以是正数,由当前的位置移动到指定的位置,有可能是同向移动,也可以反向移动。在反向时,是先进行减速,反向,再加速度的阶段组成,避免惯性对设备的伤害。
零位模式为指定的速度进行零位查找
以指定的减速度停止当前轴的运动,直至停止。
立即停止当前轴的运动。

当启动刷新状态时,以固定的间隔进行运动状态的获取。
状态读取有效时,当前轴的运行状态和限位状态
当前轴的运动速度和位置
将当前位置置为 0 位
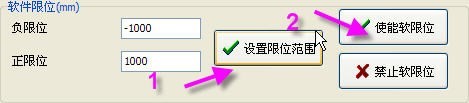
软件限位是指通过软件的方式限制本轴的运动范围。当轴运动到限定的位置时,和碰到硬件的限位效果一样,将会立即停止运动。在一些没有硬件限位,但是有零位的情况,可以通过软件限位来保护设备。
设定软件限位的范围。
注意:软件负限位要小于软件正限位,且当前位置要在范围内。
使能软件限位功能和禁止软件限位功能。在使能前,请设置软件限位范围。默认不使用软件限位

电机控制的界面如上图所示。
电机轴编号从 0 开始,对应第一轴。
开环控制(脉冲)和开环控制(物理单位)是一样的,只不过输入的参数都是以电学的脉冲为单位,而不是物理量。

切换到本选项卡时,自动读取控制器的输入状态,红色为默认的状态,绿色为有效的输入状态。
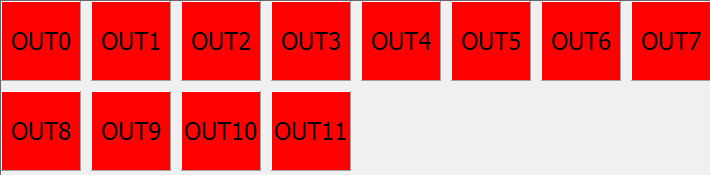
点击对应的按钮,可以切换输出的状态。红色代表无输出,绿色代表有输出。
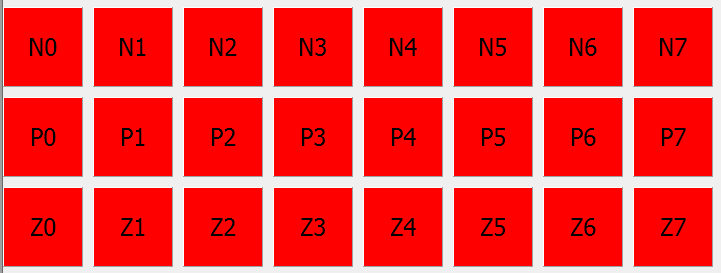
切换到本选项卡时,自动读取控制器的各轴的限位和零位的输入状态,红色为默认的状态,绿色为有效的输入状态。
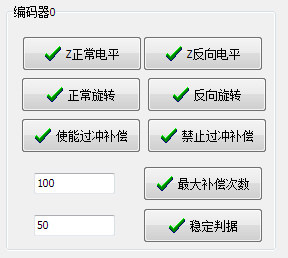 当硬件有闭环控制功能时,才有本选项,在使用闭环控制前,需要进行配置,一般情况下不需要修改。
当硬件有闭环控制功能时,才有本选项,在使用闭环控制前,需要进行配置,一般情况下不需要修改。
【Z 电平正常】和【Z 反向电平】用来切换 0 点电平的不一致。
【使能过冲补偿】【禁止过冲补偿】在有些情况下,闭环功能不能精确的到达位置,有微小的误差,通过使能过冲补偿功能可以精确的实现需要的定位。如果已经能够精确定位,不需要开启本功能,默认开始。
【最大补偿次数】【稳定判据】启用补偿功能的参数配置,误差越大,最大补偿次数需要设置的越大,稳定判据越大,补偿过程越慢。
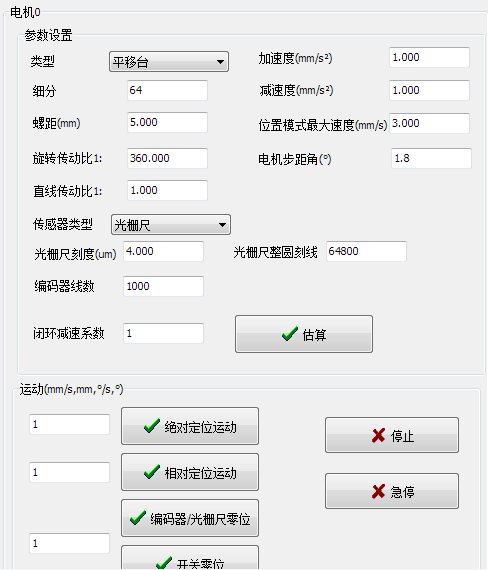
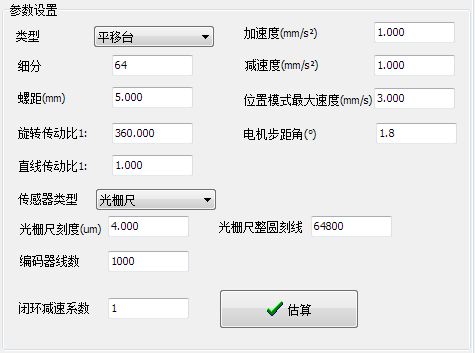
选择不同的机械类型和传感器类型,则相应的参数有效。
闭环减速系数用来优化减速过程,请根据具体的情况进行调整验证。
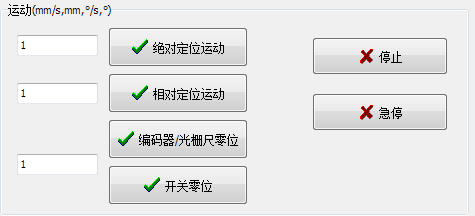
【绝对定位】和【相对定位】和开环类似,区别是通过传感器来判断是否到位。
【编码器/光栅尺零位】用来查找光栅尺或者编码器的零位,找到零位后,自动置当前位置为 0。一般光栅尺用这种模式。
【开关零位】用来通过零位开关或者限位开始来做整个系统的零位,找到零
位后,自动置当前位置为 0。一般编码器用这种模式。
勾选【刷新状态】后定时刷新当前的状态。
闭环控制(物理单位)输入输出都是相应的物理单位。
闭环控制(脉冲)和闭环控制(物理单位)类似,只是参数的单位是脉冲,运动和状态显示的单位是传感器的脉冲

























